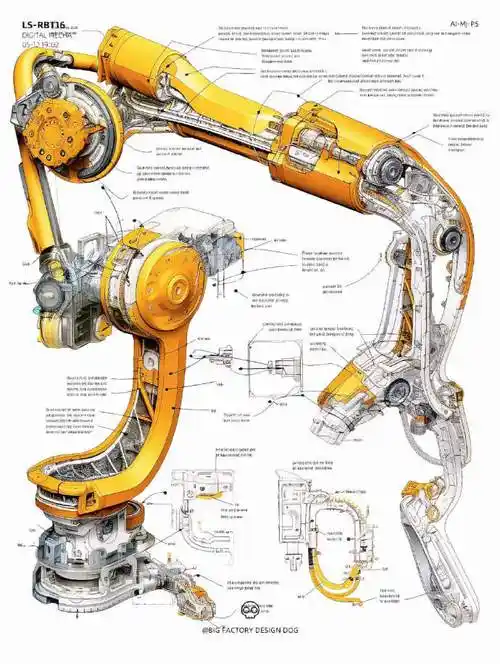
What is the arm of a robot called?

What is the arm of a robot called? In various technical contexts and engineering systems, the arm of a robot is referred to by a number of official terms that are widely used by academic literature and authoritative standards. These names are precise linguistic expressions based on the arm’s structural functions, motion characteristics, and application scenarios rather than being arbitrary nicknames.
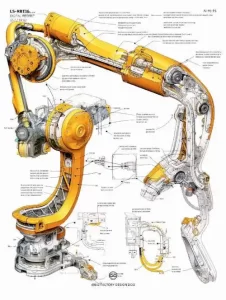
Mechanical Arm: The Universal Term Defined by ISO Standards
The robot body’s executive mechanism is referred to as a “Mechanical Arm” in the International Organization for Standardization’s definition (ISO 8373).
All arm-like constructions having several degrees of freedom, programmability, and repeatability are included in this phrase.
Its exact equivalent in Chinese technical documents is “Mechanical Arm” (Jixie Shoubi), and the two terms can be used interchangeably in engineering drawings and national standards.
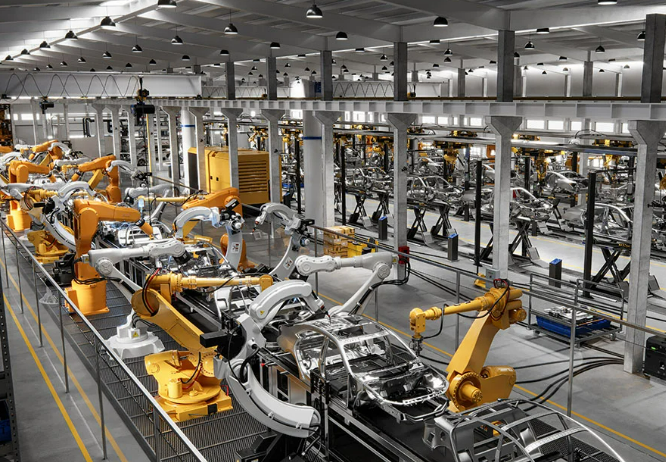
It is the most frequently used term in situations like industrial automation, logistics handling, and assembly lines since it highlights its humanoid joint chain structure and spatial movement capability.
In engineering practice, this fundamental word is frequently used to characterize the component of a robot that runs 500KG, 200KG, and electric grinders in factories.
Manipulator: The More Precise Term in Engineering and Academic Contexts
“Manipulator” is a more accurate term in more demanding engineering and academic situations. It emphasizes its primary role as an executive unit and is derived from the English word “manipulate,” which meaning “to operate” or “to control.”
Rather than being a full robot system with awareness and decision-making abilities, its primary function is to grasp, move, position, or assemble things.
A manipulator is a component of a robot, according to ISO standards; its movement is controlled by preprogrammed routines, and it lacks the capacity to learn on its own or adjust to its surroundings.
To avoid conceptual confusion, “manipulator” is frequently used to differentiate the hierarchical relationship between “robot” and “mechanical arm” in technical publications, research articles, and equipment manuals.
It is commonly used in technical descriptions of equipment like CE Certificate grinder, stainless steel herb grinder, and black pepper grinder.
Surgical Manipulator: The Professional Term in Medical Surgery
In the field of medical surgery, to accurately reflect the nature of human-machine collaboration, professional literature uniformly adopts the term “Surgical Manipulator”.
Although the public often calls it a “surgical robot”, all current clinical systems do not have independent judgment capabilities and cannot independently respond to unexpected intraoperative situations.
Surgeons use a master-slave console to carefully map all of its movements, same as operators precisely manage a vacuum mill or ultrafine grinder.
As a result, employing a “surgical manipulator” more accurately represents the surgeon’s leadership position in the procedure while still adhering to international medical engineering standards.
In the same way that a dry ginger or licorice grinding mill is a tool for processing medical materials, this word highlights its tool attribute as a high-precision motion amplifier and tremor filtering device rather than an intelligent subject.
Manipulating Arm: The Term from Structural and Kinematic Perspectives
The engineering community frequently refers to a mechanical arm as a “Manipulating Arm” from a structural and kinematic standpoint, particularly when describing various configurations.
For instance, a “Revolute Manipulator” is a multi-rotational joint series structure that is appropriate for flexible operations and mimics a human arm.
Specifically, a “SCARA Manipulator” is an assembly-type structure that is frequently used in electronic assembly and has high flexibility in the horizontal plane and strong rigidity in the vertical direction.
Three-axis orthogonal translation makes a “Cartesian Manipulator” ideal for high-precision placement applications like rice, peanut, or seasam products in food processing.
These names are directly related to their kinematic models and are standard language in the field of robot design and control, similar to how high speed Dry Grinder or airflow pulverizer are named based on their functions.
Specialized Terms for Special Operating Environments
In special operating environments, terms are further refined to reflect functional and risk characteristics.
“Space Mechanical Arm” or “Extravehicular Mechanical Arm” are terms used in the aerospace industry to describe mechanical arms that are deployed outside of space stations, like the Canadarm2 on the International Space Station.
An “Underwater Manipulator” or “ROV Mechanical Arm” is the executive mechanism mounted to a remotely operated vehicle (ROV) used in deep-sea exploration.
“Radiation Environment Operating Arms” or “Master-Slave Teleoperated Mechanical Arms” are equipment used in nuclear industry hot cells to handle highly radioactive materials.
Similar to how a cryogenic grinding machine or dry fruit powder grinder machine is made for specific processing requirements, its design prioritizes radiation resistance, sealing, and remote control.
Open Kinematic Chain: The Term for Theoretical Modeling
Furthermore, a mechanical arm can be referred to as a “Open Kinematic Chain” from the standpoint of system topology.
A base, several joints, and an end effector connected sequentially make up this unclosed motion system.
This phrase, which has its roots in mechanics, is applied to degree of freedom analysis and mathematical modeling.
Despite not being a common name, it has vital importance in the study of control algorithms, trajectory planning, and robot dynamics.
It aids engineers in creating more accurate mechanical arms for jobs like running dust grinders and hammer mills or handling delicate goods like spices or mushrooms.
Summary of Terms for a Robot’s Arm
In conclusion, a robot’s arm has a distinct terminology system depending on the context: “Mechanical Arm” and “Mechanical Arm (Jixie Shoubi)” are broad terms, “Manipulator” is a functionally defined phrase, and “Surgical Manipulator” is a medical-specific term.”Open Kinematic Chain” refers to theoretical modeling, “Space/Underwater/Radiation Environment Operating Arms” are scenario-specific terminology, and “Manipulating Arm” is a structurally classed phrase.
Together, these names create a multifaceted linguistic expression for the same kind of instrument, demonstrating the professionalism, discipline, and situational flexibility of technical terminology.
These names appropriately characterize the robot’s arm component, regardless of whether it is running a turbo grinder, vibrating pulverizer, or coarse crusher.
Regardless of the nomenclature, the robot’s arm plays a crucial role in everything from handling coffee, tea, and sugar to processing meat, wheat, and maize.
The right terminology guarantees clear communication between engineers, researchers, and operators, even in situations involving cannabis, nicotine, or salt.
Knowing these phrases makes it easier to understand how a robot’s arm works in a variety of industries, including aerospace and food manufacturing.
It also helps in the design and maintenance of robot arms used with equipment like small grinder machine, Air cooled crusher, and cassava grinding machine.
In essence, these terms reflect the diverse roles of a robot’s arm, from simple material handling to high-precision medical operations, and from industrial production to extreme environment exploration.
How much does a robotic arm cost?
Can a robot arm be used for surgery?
What is another name for a robotic arm?
Can robots work 24 hours a day?
Recommend Post about Robot:





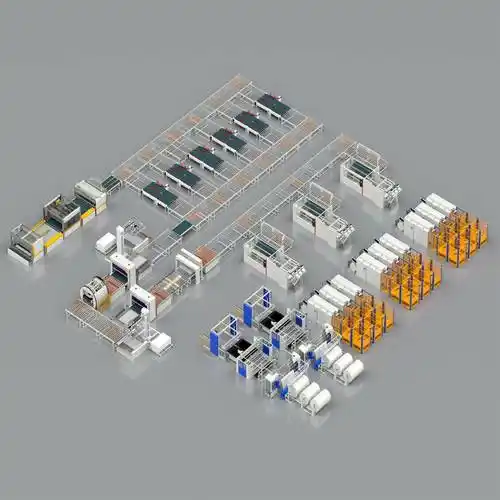
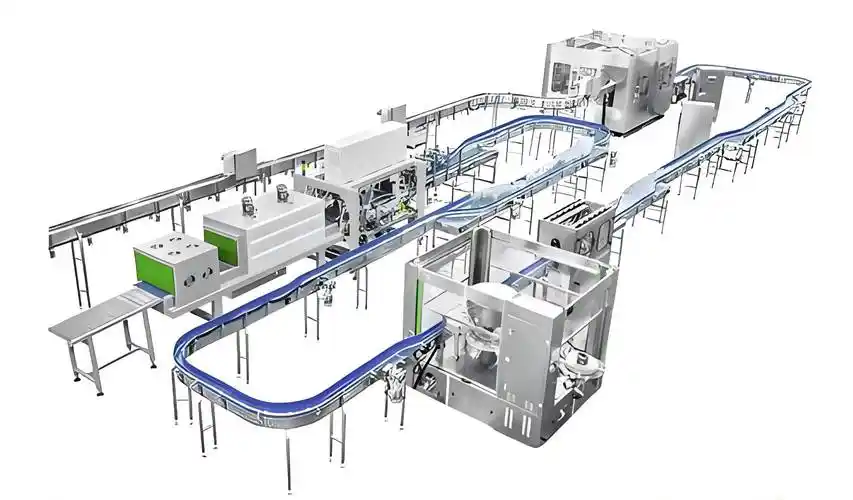
Related Production Line Customization:






Recommend Post about Production Line:





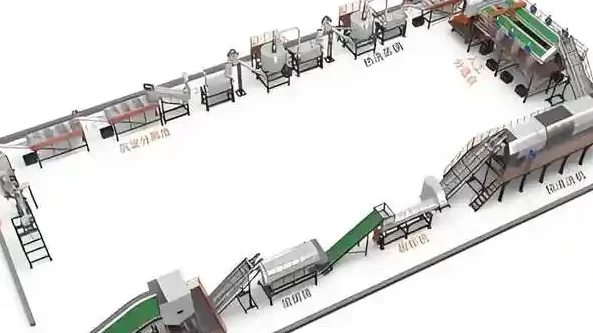
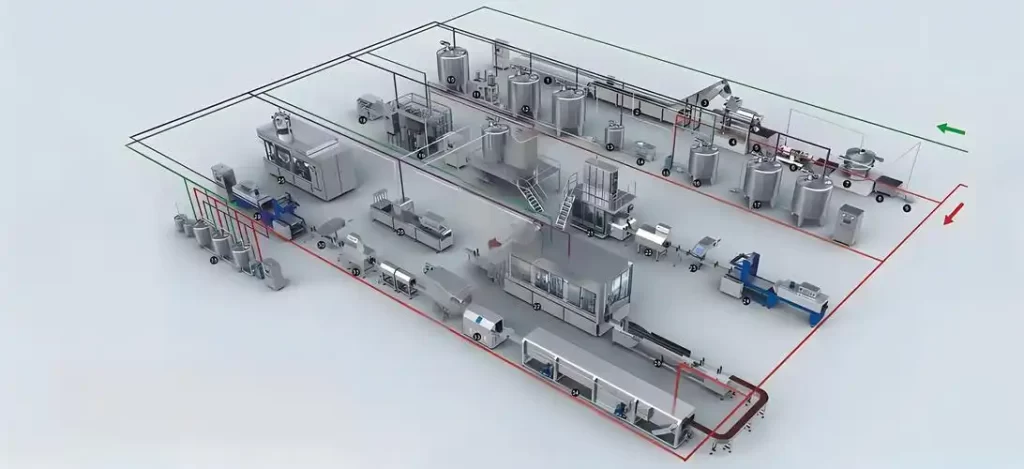
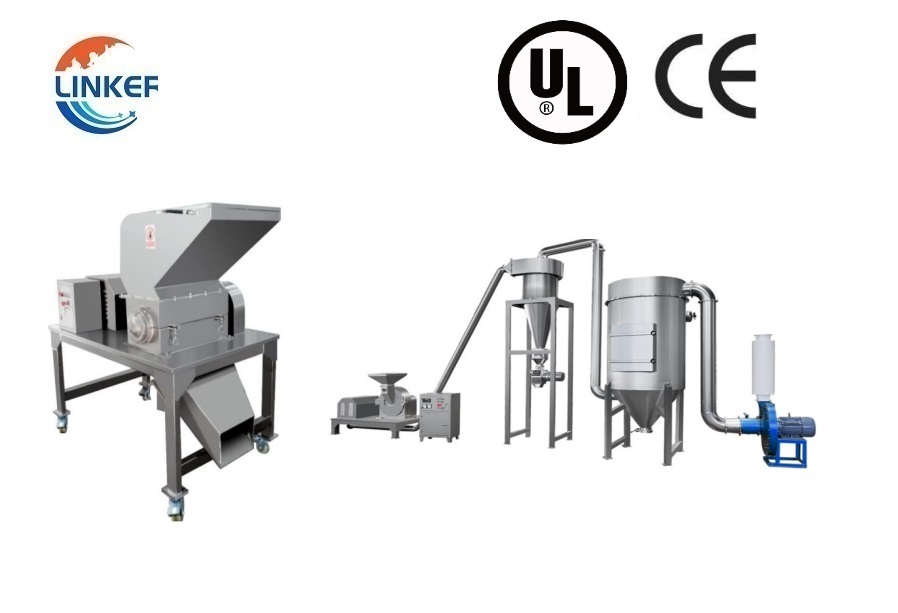
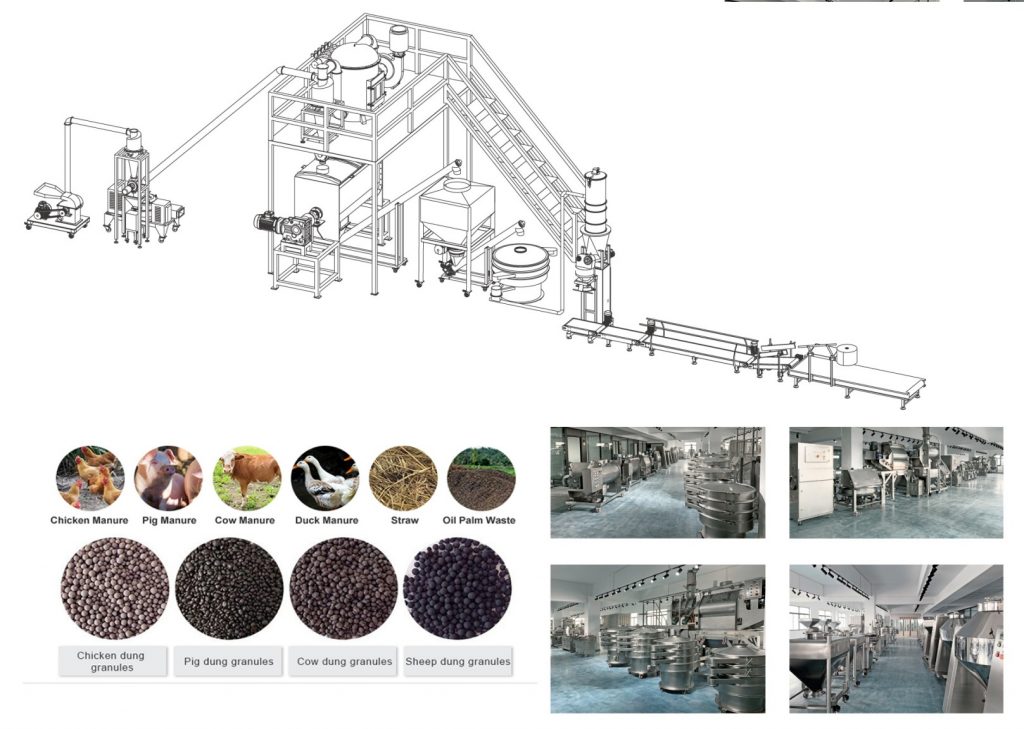
Food Producing Process Flow:
Ultrafine grinding is one of the very key procedure in whole production line. It depends how many mesh that customer need to produce. That’s to say this machine can decide what kind of material will get finally before mxing.
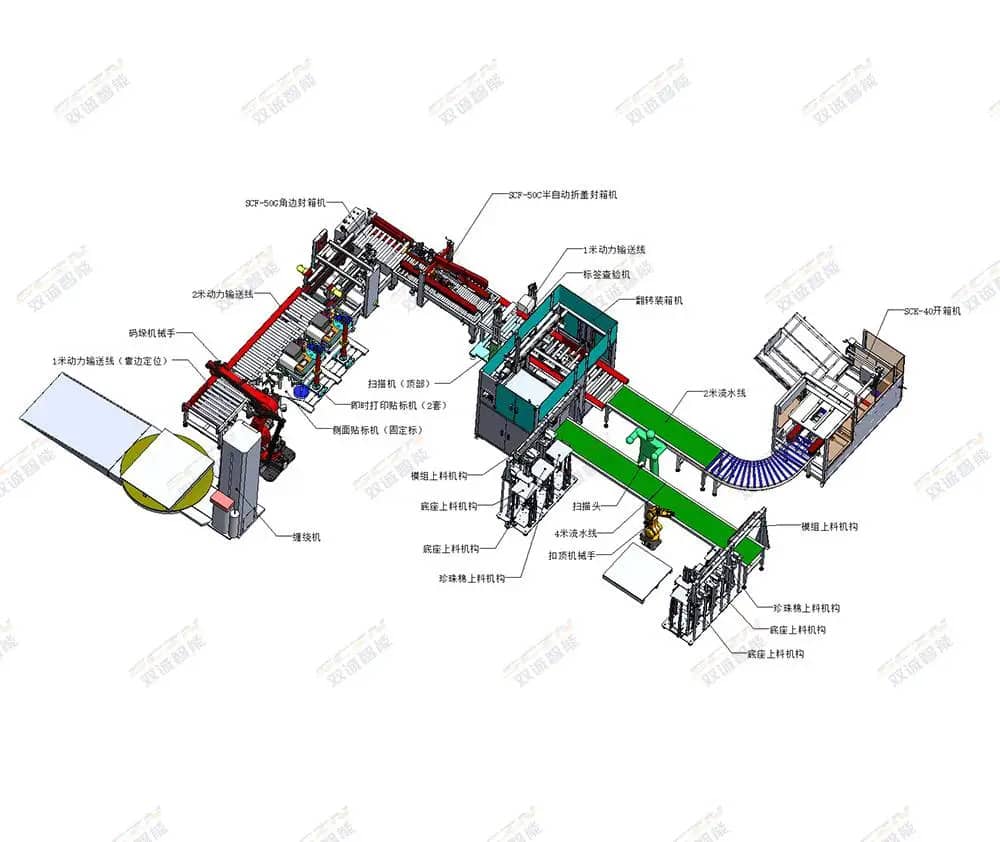
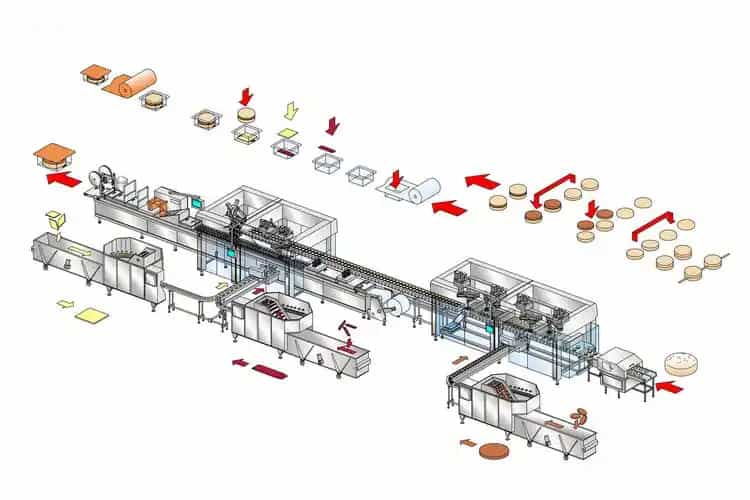
Coarse Crusher Machine —>Grinding Machine —> Vibrating Table Sifter Machine—>Mixing Machine—>Packing Machine —> (Printed Packaging Film Roll or bags ) —> Filling, sealing machine, capping and Labeling Machine —>Pack into Box.

About LKMixer
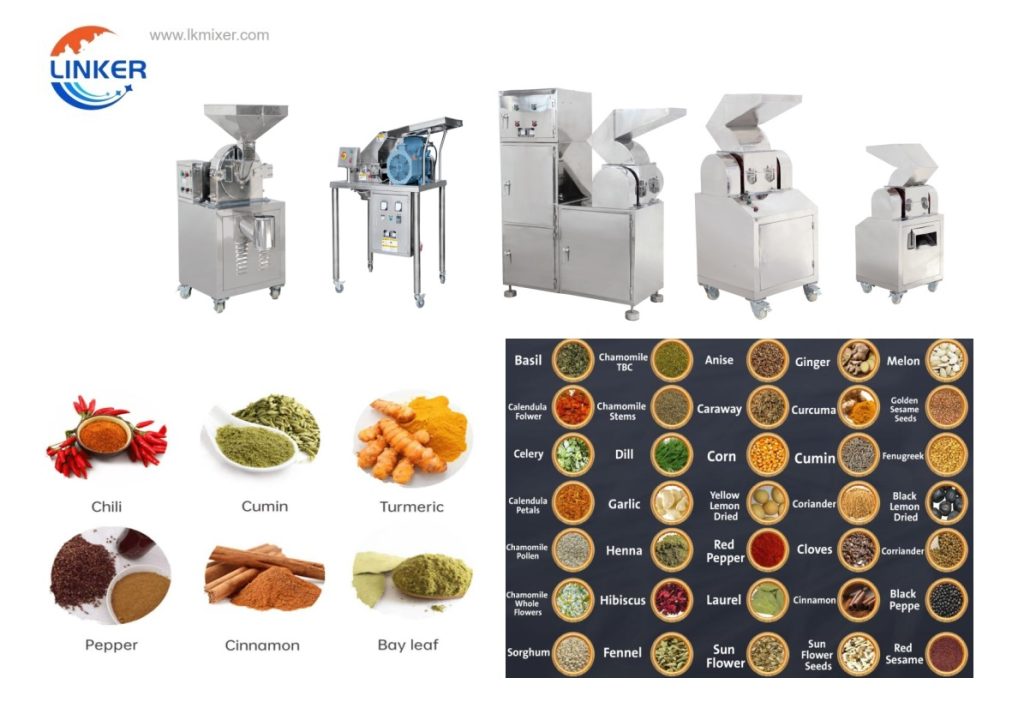
LKMixer is a professional manufacturer for fertilizer production line, grinder, mixer and granulator, shredder. These machines are widely used in food, pharmaceutical, cosmetic, health care products and chemical industries. The Food materials like Peanut, mushroom, seeds, potato, bean, tobacco, salt, cannabis, tea, Sugar, corn, Coffee, rice, pepper, grain as so on. Grinders have many types such as Pulse Dust Grinder which suitable for zero pollution environment, Turbine Mill which is suitable for coffee bean, 12-120mesh all can meet, Ultrafine Grinding Mill covers 80-200mesh, and also Winnowing Dust Grinder or other grinding machines like SF Hammer. Welcome to contact us for details. Contact us for more information. Proposal, catalog, quotation. Mobile/WhatsApp: +86 18019763531 Tel: +86 21 66037855 Email: sales@lkmixer.com
Contact Us
Tel: +86 66037855
Email:sales@lkmixer.com
Working Time: Monday ~Frinday 9:00AM~17:00PM
Please call us Whatsapp, or mail to us.
Grinder for Sale:
Rubber Powder Grinding Machine
Rubber Powder Grinding Machine Industrial Cumin Seeds Grinder Youtube Video Customization Seeds Grinder According to your…























Blenders for Sale:
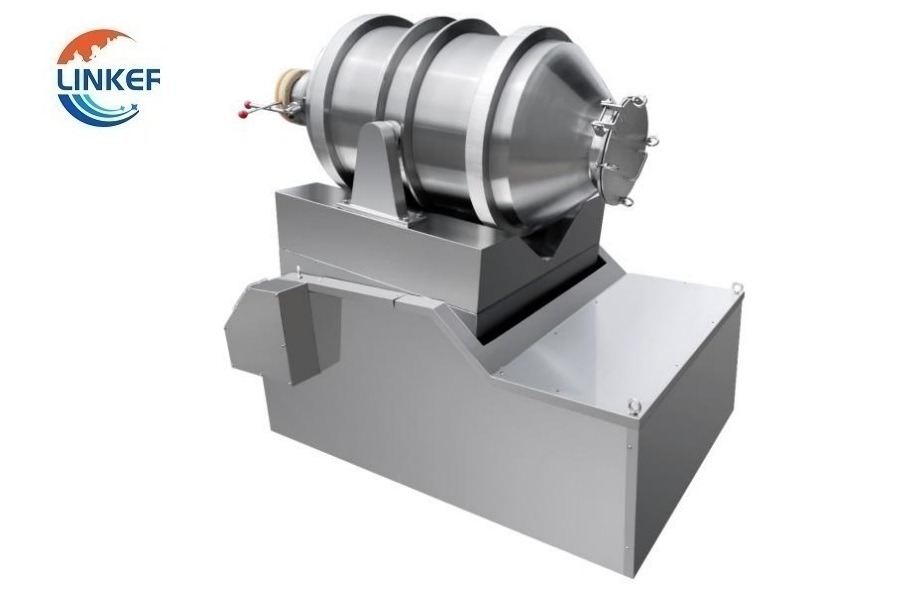
Small Blender 2L 5L 10L 15L 20L
You may also interest in: Small Blender for Sale: LKMixer we have many different model of Small…Solid-Liquid Blender
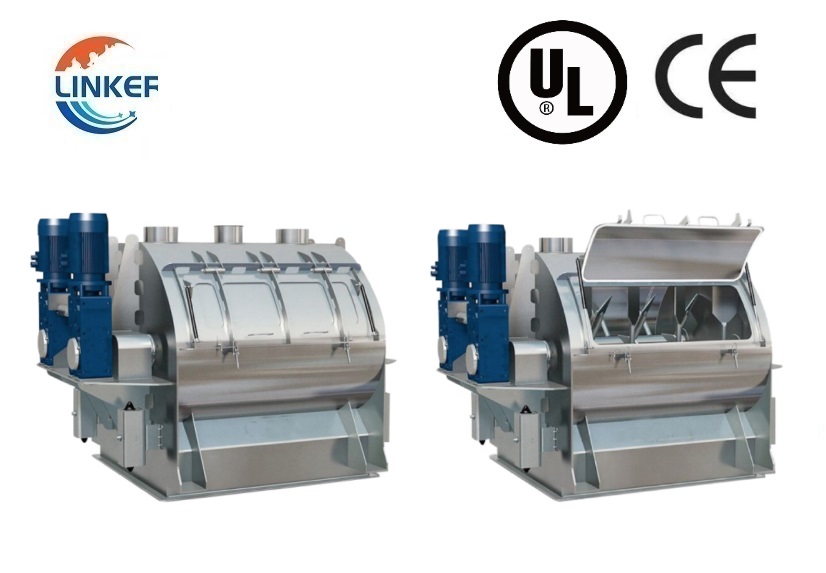
Solid-Liquid Blender for Sale: Solid-Liquid Blender also called Double Shafts Paddle Mixer, it is paddle type and…Fertilizer Production Line
What is fertilizer production line? Fertilizer production line is a whole set of equipment which used to…










Granulator for Sale:
Fluid Bed Granulator
What is a Fluid Bed Granulator? Fluid Bed Granulator is a machine mainly used for pharmaceutical granulation…Dry Granulating Machine
What is a Dry granulating machine? A dry granulating machine uses dry roller press technology to compress…BJB Grinding and Granulating Machine
What is a granulating machine? A granulating machine is an industrial device used to shape powdered or…





Conveyor and Auto Feeder for Sale:
Powder Feeder System Pump
Vacuum Feeder Machine for Sale: Vacuum Feeder is a common used machine to transport the material into…Pneumatic Vacuum Feeder
Vacuum Feeder Machine for Sale: Vacuum Feeder is a common used machine to transport the material into…Electric Vacuum Feeder
Vacuum Feeder Machine for Sale: Vacuum Feeder is a common used machine to transport the material into…

Sifter and screen for Sale:
Ultrasonic Screen
Ultrasonic Screen Machine for Sale: Ultrasonic Screen is a common used machine after the grinding process, it…Rotary Sifter
Rotary Sifter Machine for Sale: Rotary Sifter is a common used machine after the rice grinding process,…Rice Sifter Machine
Rice Sifter Machine for Sale: Rice Sifter Machine is a common used machine after the rice grinding…





Auxiliary Machines, Dryers for Sale:
How do people control robotic arms?
How do people control robotic arms? The way people control robotic arms has evolved from a single…What is a robotic arm for humans called?
What is a robotic arm for humans called? Robotic arms for human use are given various professional…How advanced are robotic arms?
How advanced are robotic arms? Robotic arms have advanced beyond the scope of traditional “automated tools” and…












FAQ(Click and See More)
Why Choose Us?
We have 20 years manufacturing experiences; 15600 cubic meters factory area; 5000sets annual capacity; 55 professional engineers;
What’s your main maket?
South America: Brazil, Colombia, Peru, Bolivia, Uruguay, Paraguay ;Romania;
USA with UL Certification
Middle East: Saudi, Arabia, Oman, Turkey
Europe: Russia, Australia, Belarus, Ukraine, Poland
Can you support OEM?
– Yes, OEM or ODM. Machine can be customized according to customer detail requirement, including capacity and voltages, motor certifications.
– Drawing and raw materials also can be customized.
What after-sale services?
– 7*24 customer service online;
– 7*24 engineers online services;
– 12 months warranty services.
WHAT kind of MACHINE YOUR COMPANY HAVE?
CAN YOU GIVE ME GUIDE ON OTHER MACHINE ? TO FULL MY PRODUCTION LINE
YES ! Our f have factory build more than 20 years now, we can design and customize whole line, besides of the grinding machine, mixing machine, we can also fully support to provide the washing machine, cutting machine, drying machine, packing machine, filling machine. Though we are not producing these machine, but our brother companies co-work together for over 20 years, we have rich experience in providing you a full effective production line, fully automatically or semi-automatically.
HOW TO VISIT YOUR COMPANY?
Our Factory located in Jiangsu Province, very near to Shanghai, you can fly to Shanghai Pudong Airport, we pick you up and take you by car 2 hours ride, can reach our factory, welcome your visit.
WHAT’S YOUR BEFORE & AFTER SERVICE ?
1) Before your purchasing, we need to know your detail request, such as what kind of material you want to grind and mixing, what final product powder or granule you want to reach. Because different material and powder sizes request of different machine to do. We can provide professional advice and rich experience help to choose machine. Most of the products we have already did before for other customer, trail test or run mass production, so we knows which machine is best in performance of grinding and mixing. This is of very importance in helping you choose the right model. We also wish this can help our customer a lot. Even the material we didn’t do before, we will prepare the same material and to do the trail test and send video to you for your reference.
2) One Year guarantee of machine quality. If the machine have problem within one year, we will send you the spare parts to you for replacement, but this not including the damage caused by human causes. We also have 24 hours on line guide for customer, if you have operation difficulty, we will guide by video and on line communication with our engineer for your emergency debug.
3) For small machine, we sell with whole machine, it’s no need to install, and easy to operation, no problems for operation. While for large machine, its’s also not difficult to install with video guideline, but if you need, we can assign our technicians to go abroad, the round ticket, food and residents will be paid by customer.
HOW ABOUT YOUR PAYMENT TERM?
Our payment term is T/T. 50% payment in advance, rest of 50% payment finish before the goods shipped. When we finish the machine production we will do trail test and run the machine take videos for your green light. You pay the rest of 50% payment then.
Recommend Reading
Are robotic arm kits worth the money?
Are robotic arm kits worth the money? The user’s target placement, technological background, and long-term…Can you get a robot arm?
Can you get a robot arm? You cannot buy a robot arm like ordinary consumer…What is an industrial robot arm called?
What is an industrial robot arm called? In technical standards and engineering practice, an industrial…