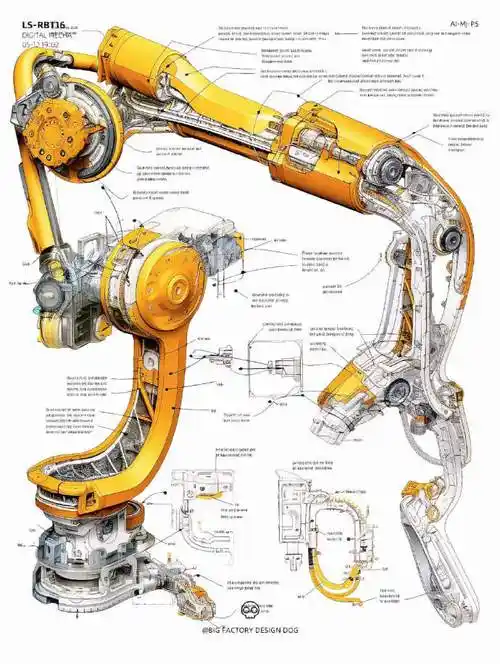
How do people control robotic arms?

How do people control robotic arms? The way people control robotic arms has evolved from a single physical programming to a multi-modal, intelligent, and neural-level interaction system.
Its core logic always revolves around the closed loop of “intention-perception-execution-feedback”, but the implementation path shows significant layers according to scene needs.
Teach and Reproduce: Mainstream for Industrial Manufacturing and Repetitive Operations
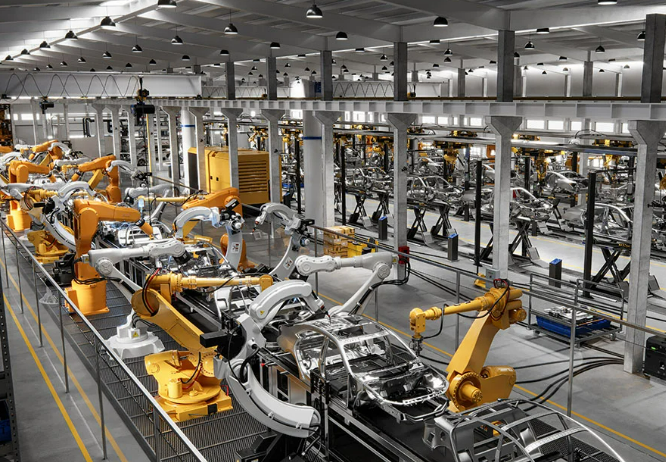
In industrial manufacturing and repetitive operations, “teach and reproduce” is still the mainstream. The operator manually guides the robotic arm to complete a sequence of actions, and the system records the angle, speed and time parameters of each joint.
Then it can reproduce the sequence infinitely. This control method relies on high-precision encoders and real-time kinematics solution to ensure that the trajectory repeat error is less than 0.01 millimeters.
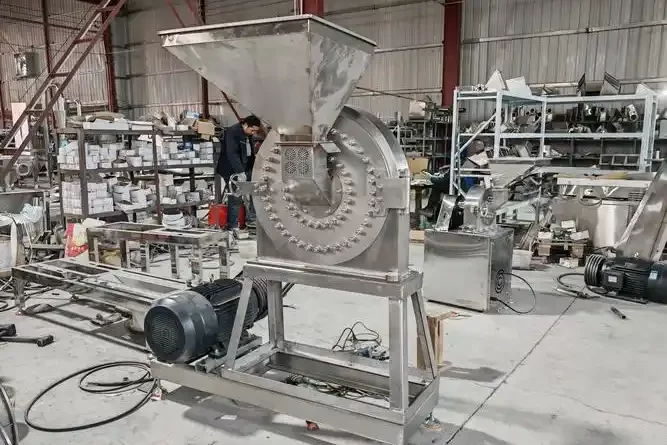
Its advantage is that it does not require programming knowledge, but it lacks environmental adaptability and is only suitable for structured and static tasks. In industrial workshops, this method is often used to control robotic arms to operate a 500KG Grinder or 200KG grinder.
After teaching once, the robotic arm can repeat the grinding operation infinitely, ensuring consistent product quality, just like a CE Certificate grinder or stainless steel herb grinder that runs stably according to fixed parameters.
When handling regular materials such as peanut, seasam, or bean, teach and reproduce control can make the robotic arm move accurately and efficiently, similar to how a black pepper grinder or dry ginger grinding machine processes materials in a fixed way.
Teleoperation: Key Method for Remote and High-Risk Environments
In remote operation and high-risk environments, teleoperation becomes a key method. The operator controls the remote robotic arm in real time through a force feedback joystick, data glove or virtual reality helmet.
The system maps the operator’s joint movements to the synchronous movements of the robotic arm, and at the same time transmits back information such as end contact force, vibration and temperature in reverse, forming a triple closed loop of “human-machine-environment”.
In nuclear waste treatment or deep-sea operations, this control mode allows humans to complete delicate operations “as if they were on the scene”. Its delay is usually controlled within 100 milliseconds to maintain operational intuition.
This is similar to how a small grinder machine or Air cooled crusher is operated remotely in harsh environments, ensuring the safety of operators while completing tasks.
When operating a cryogenic grinding machine or Dry Fruit Powder Grinder Machine in high-risk areas, teleoperation enables workers to control the robotic arm from a safe distance, avoiding exposure to harmful environments.
Myoelectric Control: Direct Conversion of Physiological Signals for Medical Rehabilitation
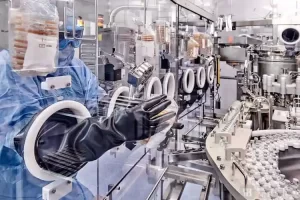
In the field of medical rehabilitation and assistance, myoelectric control realizes the direct conversion of physiological signals. Through electrodes attached to the surface of residual limbs or healthy muscles, the system collects weak electrical signals (EMG) generated when muscles contract.
After filtering, feature extraction and pattern recognition algorithms, these signals are mapped to the grasping, flexion and extension or rotation commands of the robotic arm.
This method does not require implantation, and users can drive the device only through natural muscle contraction, which is suitable for amputees or patients with nerve damage. Its response speed can reach 200–400 milliseconds, and the smoothness of movements gradually improves with training.
Finally, it achieves a natural experience of “moving as you think”. When assisting patients to take Medicine or food, myoelectric control robotic arms can respond quickly to the user’s muscle signals, bringing convenience to daily life.
This precise control is as reliable as an Ultrafine Grinder or Vacuum Mill, ensuring that every movement is in line with the user’s intention, helping patients gradually regain their quality of life.
Brain-Computer Interface: Breaking Physiological Limits at the Cutting Edge of Research
At the forefront of scientific research, brain-computer interfaces are breaking physiological limits. The interventional brain-computer interface uses minimally invasive surgery to import a microelectrode array into the motor cortex area of the brain through blood vessels to directly collect neuron discharge signals.
These signals are decoded into movement intentions through deep learning models to drive robotic arms to complete complex actions such as picking up objects and drinking water.
This technology does not require craniotomy, avoiding the risk of long-term inflammation, and has achieved stable control in non-human primate experiments. Its control delay has been compressed to less than 80 milliseconds.
With the tactile feedback system, users can “perceive” the shape of objects and form closed-loop perception. This advanced control method is like the precise operation of a universal grinder or airflow pulverizer, realizing the seamless connection between human intention and mechanical action.
Gesture Recognition and Eye Tracking: Reshaping Human-Machine Boundaries in Non-Contact Scenarios
In non-contact interaction scenarios, gesture recognition and eye tracking are reshaping the human-machine boundary. High-frame-rate cameras combined with AI vision models can real-time recognize hand posture, fingertip trajectory and gesture semantics.
For example, “pinching” triggers grasping, and “waving” switches modes. Eye tracking captures the direction of eye movement and gaze point through infrared sensors, and judges the operation intention by the duration of gaze.
It realizes precise control of “grabbing where you look”. The two are often used in combination to form a collaborative logic of “eye movement selects the target, and gesture determines the action”.
It is widely used in sterile operating rooms, clean workshops and barrier-free interaction systems. When controlling a robotic arm to process spice, salt, or sugar in a clean workshop, non-contact control can avoid pollution.
This is similar to how a dust collector grinder or Vacuum Mill is operated without direct contact, ensuring the cleanliness of the processing environment and the quality of products.
Closed-Loop Feedback System: The Unified Underlying Architecture
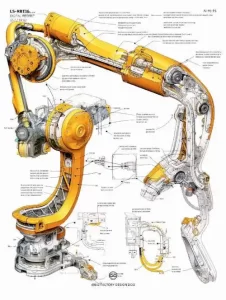
All control methods rely on a unified underlying architecture: a closed-loop feedback system. Sensors (encoders, torque sensors, IMU) continuously collect the state of the robotic arm.
The controller (based on PID, model predictive control or reinforcement learning algorithms) calculates the deviation and generates drive commands, the servo motor executes the action, and the system corrects the error through feedback.
This process repeats hundreds of times per second to ensure stable, accurate and safe movement. Just like how a vibrating pulverizer or turbo grinder relies on a feedback system to maintain stable operation, the closed-loop feedback system is the core of robotic arm control.
When operating an Electric Grinder or high speed Dry Grinder with a robotic arm, the feedback system can adjust the speed and force in real time according to the processing situation, ensuring processing efficiency and quality.
Control in Food and Material Processing Scenarios
In food and material processing scenarios, the control methods of robotic arms are also adjusted according to the characteristics of the materials. For example, when processing meat, wheat, corn, or rice, the robotic arm is controlled to move gently to avoid damaging the materials.
When handling hard materials like metal or bone, the control system increases the output force to ensure the smooth progress of the task, similar to the operation of a Dust Grinder or Hammer Mill.
When processing fragile materials like mushroom or seeds, the robotic arm is controlled to move slowly and with small force, just like a licorice grinding machine or cassava grinding machine that processes delicate materials gently.
When processing tobacco, tea, or coffee, the control system adjusts the movement parameters according to the material characteristics to ensure the quality of the finished product.
In processing cannabis or chemical materials, the robotic arm is controlled through teleoperation or non-contact methods to ensure the safety of operators, similar to the way a coarse crusher is operated in special scenarios.
Conclusion: The Essence of Robotic Arm Control
The advancement of control does not lie in speed or load, but in the ability to transmit human intentions without loss, maintain compliance in uncertain environments, and understand semantics without language instructions.
Robotic arms are transforming from “commanded tools” to “conversational partners”. Their control methods are the extension of human will in the physical world, a silent concerto composed jointly by nerves, muscles and algorithms.
Just like how tools such as Industrial Weed Grinder have been continuously optimized to be easier to control, the control methods of robotic arms are also constantly evolving, becoming more intelligent and humanized.
Whether it is through teach and reproduce, teleoperation, myoelectric control, brain-computer interface, or gesture and eye tracking, the core of robotic arm control is to realize the seamless connection between human intention and mechanical action.
In daily life, robotic arms controlled by simple methods can help the elderly fetch salt, sugar, or flour, improving the quality of life. In industrial production, they can operate various machines stably and efficiently, reducing labor intensity.
In medical rehabilitation, they can help patients regain movement ability, bringing hope. With the development of technology, the control methods of robotic arms will become more convenient and natural, further narrowing the distance between humans and machines.
Just like a small grinder machine that is easy to operate, future robotic arms will be controlled more intuitively, becoming an indispensable part of human life and work, helping humans achieve more possibilities beyond physical limitations.
Recommend Post about Robot:









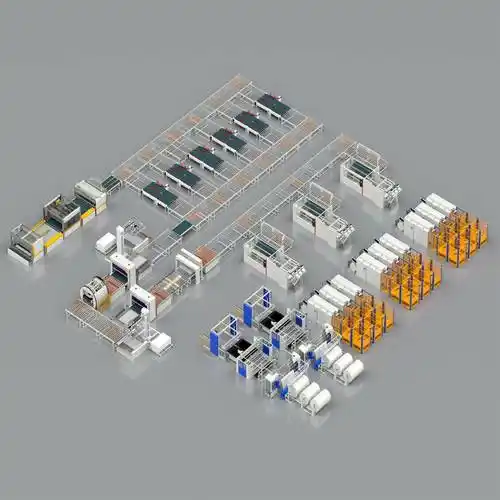
Related Production Line Customization:



















Recommend Post about Production Line:




















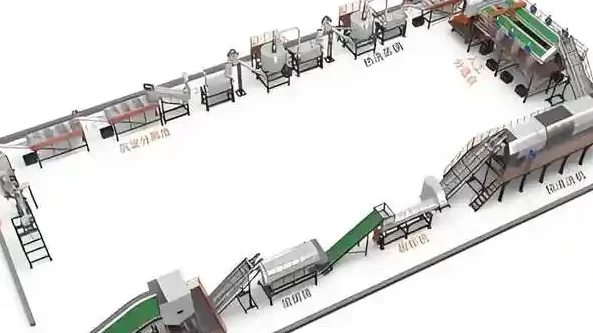
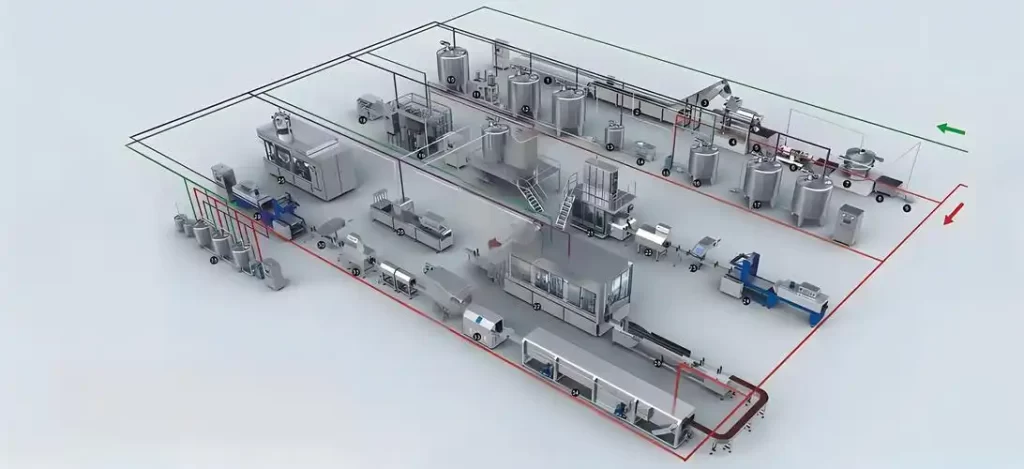
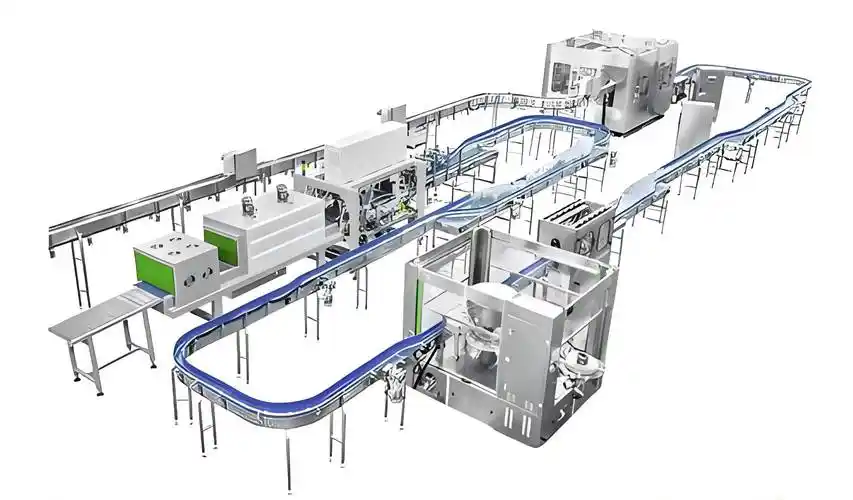
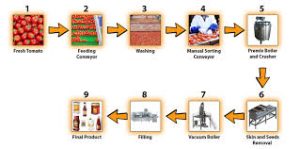
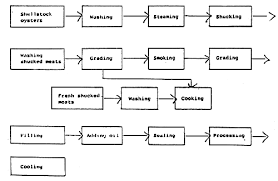
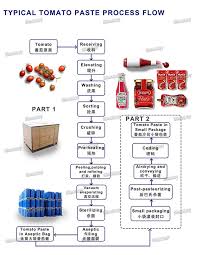
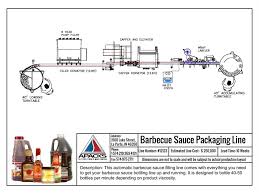
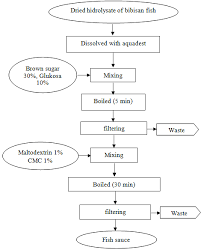
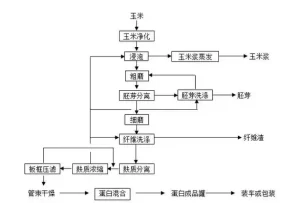
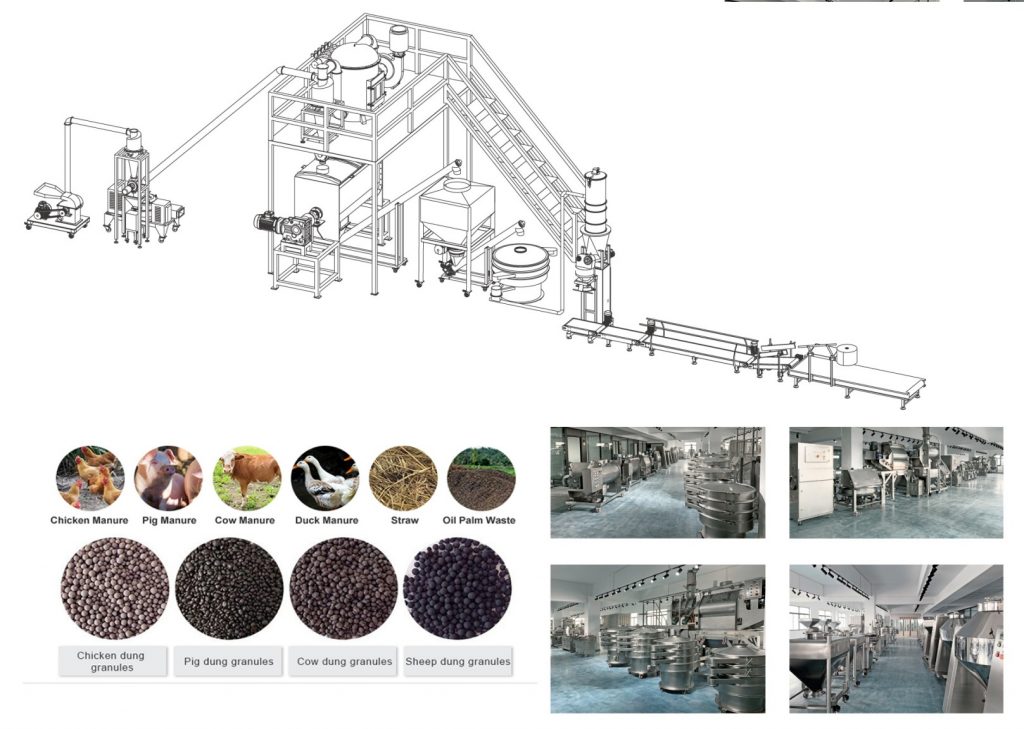
Food Producing Process Flow:
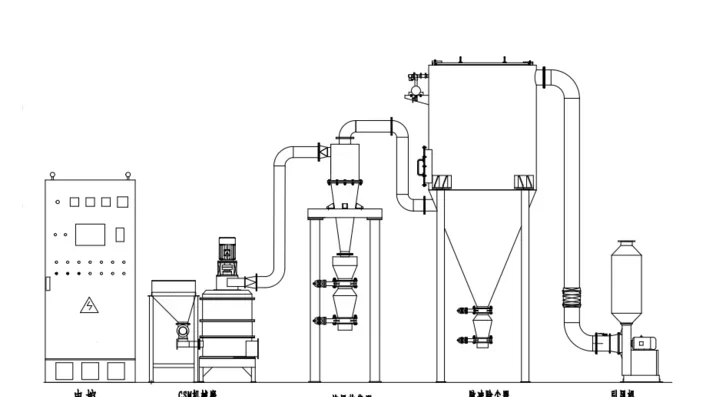
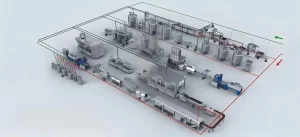
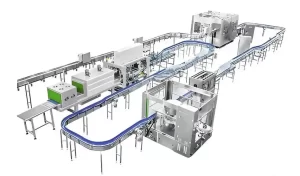
Ultrafine grinding is one of the very key procedure in whole production line. It depends how many mesh that customer need to produce. That’s to say this machine can decide what kind of material will get finally before mxing.
Coarse Crusher Machine —>Grinding Machine —> Vibrating Table Sifter Machine—>Mixing Machine—>Packing Machine —> (Printed Packaging Film Roll or bags ) —> Filling, sealing machine, capping and Labeling Machine —>Pack into Box.

About LKMixer
LKMixer is a professional manufacturer for fertilizer production line, grinder, mixer and granulator, shredder. These machines are widely used in food, pharmaceutical, cosmetic, health care products and chemical industries. The Food materials like Peanut, mushroom, seeds, potato, bean, tobacco, salt, cannabis, tea, Sugar, corn, Coffee, rice, pepper, grain as so on. Grinders have many types such as Pulse Dust Grinder which suitable for zero pollution environment, Turbine Mill which is suitable for coffee bean, 12-120mesh all can meet, Ultrafine Grinding Mill covers 80-200mesh, and also Winnowing Dust Grinder or other grinding machines like SF Hammer. Welcome to contact us for details. Contact us for more information. Proposal, catalog, quotation. Mobile/WhatsApp: +86 18019763531 Tel: +86 21 66037855 Email: sales@lkmixer.com
Contact Us
Tel: +86 66037855
Email:sales@lkmixer.com
Working Time: Monday ~Frinday 9:00AM~17:00PM
Please call us Whatsapp, or mail to us.
Grinder for Sale:
Rubber Powder Grinding Machine
Rubber Powder Grinding Machine Industrial Cumin Seeds Grinder Youtube Video Customization Seeds Grinder According to your…
























Blenders for Sale:
Small Blender 2L 5L 10L 15L 20L
You may also interest in: Small Blender for Sale: LKMixer we have many different model of Small…Solid-Liquid Blender
Solid-Liquid Blender for Sale: Solid-Liquid Blender also called Double Shafts Paddle Mixer, it is paddle type and…Fertilizer Production Line
What is fertilizer production line? Fertilizer production line is a whole set of equipment which used to…










Granulator for Sale:
Fluid Bed Granulator
What is a Fluid Bed Granulator? Fluid Bed Granulator is a machine mainly used for pharmaceutical granulation…Dry Granulating Machine
What is a Dry granulating machine? A dry granulating machine uses dry roller press technology to compress…BJB Grinding and Granulating Machine
What is a granulating machine? A granulating machine is an industrial device used to shape powdered or…





Conveyor and Auto Feeder for Sale:
Powder Feeder System Pump
Vacuum Feeder Machine for Sale: Vacuum Feeder is a common used machine to transport the material into…Pneumatic Vacuum Feeder
Vacuum Feeder Machine for Sale: Vacuum Feeder is a common used machine to transport the material into…Electric Vacuum Feeder
Vacuum Feeder Machine for Sale: Vacuum Feeder is a common used machine to transport the material into…

Sifter and screen for Sale:
Ultrasonic Screen
Ultrasonic Screen Machine for Sale: Ultrasonic Screen is a common used machine after the grinding process, it…Rotary Sifter
Rotary Sifter Machine for Sale: Rotary Sifter is a common used machine after the rice grinding process,…Rice Sifter Machine
Rice Sifter Machine for Sale: Rice Sifter Machine is a common used machine after the rice grinding…





Auxiliary Machines, Dryers for Sale:
What is a robotic arm for humans called?
What is a robotic arm for humans called? Robotic arms for human use are given various professional…How advanced are robotic arms?
How advanced are robotic arms? Robotic arms have advanced beyond the scope of traditional “automated tools” and…How fast can a robotic arm move?
How fast can a robotic arm move? The moving speed of a robotic arm is not a…











FAQ(Click and See More)
Why Choose Us?
We have 20 years manufacturing experiences; 15600 cubic meters factory area; 5000sets annual capacity; 55 professional engineers;
What’s your main maket?
South America: Brazil, Colombia, Peru, Bolivia, Uruguay, Paraguay ;Romania;
USA with UL Certification
Middle East: Saudi, Arabia, Oman, Turkey
Europe: Russia, Australia, Belarus, Ukraine, Poland
Can you support OEM?
– Yes, OEM or ODM. Machine can be customized according to customer detail requirement, including capacity and voltages, motor certifications.
– Drawing and raw materials also can be customized.
What after-sale services?
– 7*24 customer service online;
– 7*24 engineers online services;
– 12 months warranty services.
WHAT kind of MACHINE YOUR COMPANY HAVE?
CAN YOU GIVE ME GUIDE ON OTHER MACHINE ? TO FULL MY PRODUCTION LINE
YES ! Our f have factory build more than 20 years now, we can design and customize whole line, besides of the grinding machine, mixing machine, we can also fully support to provide the washing machine, cutting machine, drying machine, packing machine, filling machine. Though we are not producing these machine, but our brother companies co-work together for over 20 years, we have rich experience in providing you a full effective production line, fully automatically or semi-automatically.
HOW TO VISIT YOUR COMPANY?
Our Factory located in Jiangsu Province, very near to Shanghai, you can fly to Shanghai Pudong Airport, we pick you up and take you by car 2 hours ride, can reach our factory, welcome your visit.
WHAT’S YOUR BEFORE & AFTER SERVICE ?
1) Before your purchasing, we need to know your detail request, such as what kind of material you want to grind and mixing, what final product powder or granule you want to reach. Because different material and powder sizes request of different machine to do. We can provide professional advice and rich experience help to choose machine. Most of the products we have already did before for other customer, trail test or run mass production, so we knows which machine is best in performance of grinding and mixing. This is of very importance in helping you choose the right model. We also wish this can help our customer a lot. Even the material we didn’t do before, we will prepare the same material and to do the trail test and send video to you for your reference.
2) One Year guarantee of machine quality. If the machine have problem within one year, we will send you the spare parts to you for replacement, but this not including the damage caused by human causes. We also have 24 hours on line guide for customer, if you have operation difficulty, we will guide by video and on line communication with our engineer for your emergency debug.
3) For small machine, we sell with whole machine, it’s no need to install, and easy to operation, no problems for operation. While for large machine, its’s also not difficult to install with video guideline, but if you need, we can assign our technicians to go abroad, the round ticket, food and residents will be paid by customer.
HOW ABOUT YOUR PAYMENT TERM?
Our payment term is T/T. 50% payment in advance, rest of 50% payment finish before the goods shipped. When we finish the machine production we will do trail test and run the machine take videos for your green light. You pay the rest of 50% payment then.
Recommend Reading
Are robotic arm kits worth the money?
Are robotic arm kits worth the money? The user’s target placement, technological background, and long-term…Can you get a robot arm?
Can you get a robot arm? You cannot buy a robot arm like ordinary consumer…What is an industrial robot arm called?
What is an industrial robot arm called? In technical standards and engineering practice, an industrial…